The power of the frequency converter must be determined according to the connected motor. The first step is to add up the total power or full load current of the connected motors. Of the two, current is the better parameter, but sometimes it cannot be used. Once this sum is calculated, the frequency converter can be selected based on the total power or current. The power of the frequency converter should be equal to or greater than this sum.
Normal frequency converter operation maintains a constant speed for all connected motors, provided the correct motor type is used. Standard induction motors tend to have some fluctuations in line frequency as the load changes, so the speed will not be in sync. The solution is to use a three-phase, variable frequency synchronous induction motor, which ensures that the motor speed is synchronized with the line frequency.
Unlike individual motors connected to a frequency converter, each motor is protected against overloads and short circuits. When controlling a single motor, a properly functioning frequency converter can usually provide the motor with short-circuit and overload protection and, if appropriate, sense over-current conditions. When controlling multiple motors, the frequency converter senses their total connected load and outputs as much current as needed within its rated current range. A frequency converter cannot sense which motor is drawing high current, so it cannot provide proper overload and overcurrent protection for each motor.
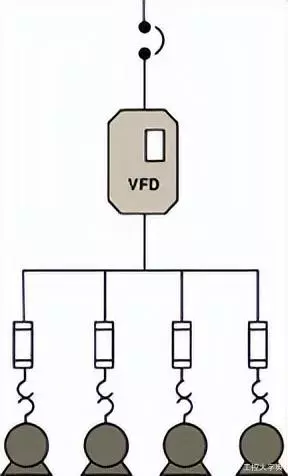
For example, a 50A inverter controls four 10A motors with a total connected load of 40A as shown in the diagram below, if one of the motors is overloaded and consumes 15 amps while the other three motors continue to run normally, it is difficult to configure the inverter protection circuit to sense overload conditions. That’s why each individual motor must have its own short circuit and overload protection.
The overload protection is designed to disconnect individual motors from the frequency converter if the motor draws more than normal but falls below 8 times for an extended period of time. This protects the motor and motor conductors from overheating. The most common type of motor overload protection technology is the thermal relay.
Short circuit protection is to protect against short circuits and ground faults, overcurrent conditions greater than 8 times the motor current These types of conditions can be very damaging, so the motor must be disconnected within a fraction of a second. The two main types of short circuit protection devices are fuses and circuit breakers.
With single motor protection, only the failed motor is disconnected and the remaining motors continue to run. This is necessary in applications where it is not possible to bring the entire system to a halt while a single motor is being repaired or replaced.
As mentioned above, one disadvantage of controlling multiple motors is that the frequency converter becomes a single point of failure for the entire system. This disadvantage can be eliminated by using a bypass circuit as depicted in the figure below.
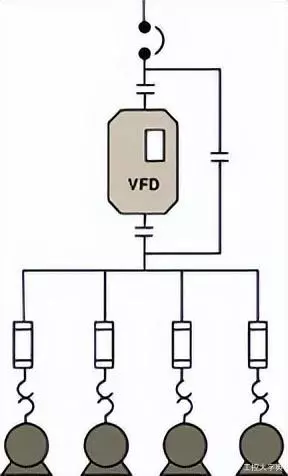
With the bypass arrangement of these three contactors, the motor can still run if the frequency converter fails. Just at rated speed, not at the speed controlled by the drive. The contactors above and below the drive are opened and the bypass contactor is closed. This bypasses the frequency converter and connects all motors directly to line power.
Engineers and companies are always looking for simple and creative ways to optimize the performance and design of drives, motors, connected load systems. Using a frequency converter to control multiple motors fits this requirement as it saves money, reduces floor space and simplifies maintenance. From simply using one frequency converter to control two motors on a make-up air unit, to using one frequency converter to control a large array of 14 motors on an air handler supply fan, multi-motor configurations are reasonable in many different applications .
One frequency converter controls the power selection of multiple motors with different starting sequences
When a frequency converter is used to control multiple motors with different starting sequences, the power and selection of the frequency converter becomes more complicated, unless all the motors are started at the same time. Adding the power of each motor to get the total load and selecting the drive accordingly, depending on the operating conditions this may not be enough.
With one or more motors already running, it is not possible to start one of the motors unless the selected drive is large enough. The following example illustrates this, three 380VAC motors are connected to a frequency converter, and two of the motors are rated at 5A. The third motor is rated at 10A. If all the motors are accelerated, decelerated and run synchronously, the total current of the motors connected is 20A. But if it is necessary to speed up and run a 5A motor and then start a 10A motor, then the total current has to be recalculated
Two 5A motors can be added together, but the current of a 10A motor at startup must be taken into account, which generally needs to be 6-7 times the rated current. It will treat the drive as a fixed voltage/frequency line starter at full rated current to rapidly accelerate to the drive’s output frequency.
So when the 10A is started through the inverter, the current count on the inverter will be two 5A, plus the starting current of the 10A motor, which is 60A. Therefore, the total amperage figure for frequency converter sizing is 5A + 5A + 60A (starting current) = 70A. This amp load required an increase to a 40KW inverter with a minimum continuous output rating of 80 amps, twice the power of the inverter.
The power of the frequency converter must be determined according to the connected motor. The first step is to add up the total power or full load current of the connected motors. Of the two, current is the better parameter, but sometimes it cannot be used. Once this sum is calculated, the frequency converter can be selected based on the total power or current. The power of the frequency converter should be equal to or greater than this sum.
Normal frequency converter operation maintains a constant speed for all connected motors, provided the correct motor type is used. Standard induction motors tend to have some fluctuations in line frequency as the load changes, so the speed will not be in sync. The solution is to use a three-phase, variable frequency synchronous induction motor, which ensures that the motor speed is synchronized with the line frequency.
Unlike individual motors connected to a frequency converter, each motor is protected against overloads and short circuits. When controlling a single motor, a properly functioning frequency converter can usually provide the motor with short-circuit and overload protection and, if appropriate, sense over-current conditions. When controlling multiple motors, the frequency converter senses their total connected load and outputs as much current as needed within its rated current range. A frequency converter cannot sense which motor is drawing high current, so it cannot provide proper overload and overcurrent protection for each motor.
For example, a 50A inverter controls four 10A motors with a total connected load of 40A as shown in the diagram below, if one of the motors is overloaded and consumes 15 amps while the other three motors continue to run normally, it is difficult to configure the inverter protection circuit to sense overload conditions. That’s why each individual motor must have its own short circuit and overload protection.
The overload protection is designed to disconnect individual motors from the frequency converter if the motor draws more than normal but falls below 8 times for an extended period of time. This protects the motor and motor conductors from overheating. The most common type of motor overload protection technology is the thermal relay.
Short circuit protection is to protect against short circuits and ground faults, overcurrent conditions greater than 8 times the motor current These types of conditions can be very damaging, so the motor must be disconnected within a fraction of a second. The two main types of short circuit protection devices are fuses and circuit breakers.
With single motor protection, only the failed motor is disconnected and the remaining motors continue to run. This is necessary in applications where it is not possible to bring the entire system to a halt while a single motor is being repaired or replaced.
As mentioned above, one disadvantage of controlling multiple motors is that the frequency converter becomes a single point of failure for the entire system. This disadvantage can be eliminated by using a bypass circuit as depicted in the figure below.
With the bypass arrangement of these three contactors, the motor can still run if the frequency converter fails. Just at rated speed, not at the speed controlled by the drive. The contactors above and below the drive are opened and the bypass contactor is closed. This bypasses the frequency converter and connects all motors directly to line power.
Engineers and companies are always looking for simple and creative ways to optimize the performance and design of drives, motors, connected load systems. Using a frequency converter to control multiple motors fits this requirement as it saves money, reduces floor space and simplifies maintenance. From simply using one frequency converter to control two motors on a make-up air unit, to using one frequency converter to control a large array of 14 motors on an air handler supply fan, multi-motor configurations are reasonable in many different applications .
One frequency converter controls the power selection of multiple motors with different starting sequences
When a frequency converter is used to control multiple motors with different starting sequences, the power and selection of the frequency converter becomes more complicated, unless all the motors are started at the same time. Adding the power of each motor to get the total load and selecting the drive accordingly, depending on the operating conditions this may not be enough.
With one or more motors already running, it is not possible to start one of the motors unless the selected drive is large enough. The following example illustrates this, three 380VAC motors are connected to a frequency converter, and two of the motors are rated at 5A. The third motor is rated at 10A. If all the motors are accelerated, decelerated and run synchronously, the total current of the motors connected is 20A. But if it is necessary to speed up and run a 5A motor and then start a 10A motor, then the total current has to be recalculated
Two 5A motors can be added together, but the current of a 10A motor at startup must be taken into account, which generally needs to be 6-7 times the rated current. It will treat the drive as a fixed voltage/frequency line starter at full rated current to rapidly accelerate to the drive’s output frequency.
So when the 10A is started through the inverter, the current count on the inverter will be two 5A, plus the starting current of the 10A motor, which is 60A. Therefore, the total amperage figure for frequency converter sizing is 5A + 5A + 60A (starting current) = 70A. This amp load required an increase to a 40KW inverter with a minimum continuous output rating of 80 amps, twice the power of the inverter.
continue reading
Related Posts

Variable Frequency Drives (VFDs) and motors are integral components in industrial automation, each serving distinct yet interconnected roles in controlling […]
Variable frequency motors (VFMs) are crucial in modern industrial applications due to their efficiency and precise control over motor speed […]

Variable Frequency Technology (VFT) is increasingly being recognized as a game-changer in the industrial automation sector, particularly in applications involving […]